

- DC Shunt Motor Definition: A DC shunt motor is defined as a type of DC motor where the field windings are connected in parallel to the armature winding, allowing both to receive the same voltage.
- Constant Flux: The DC shunt motor is a constant flux motor because the field flux remains nearly constant due to the parallel connection of the windings.
- Self-Speed Regulation: DC shunt motors can self-regulate their speed when the load changes, maintaining a steady speed without external modifications.
- Torque and Speed Relationship: In a DC shunt motor, the torque is proportional to the armature current, which helps the motor adjust its speed when the load varies.
- Industrial Use: DC shunt motors are popular in industrial applications where constant speed operation is essential, thanks to their self-regulating speed feature.
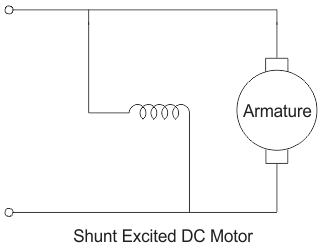
A DC shunt motor (also known as a shunt wound DC motor) is defined as a type of self-excited DC motor where the field windings are connected in parallel to the armature winding. This parallel connection means both windings receive the same supply voltage. Separate branches allow armature and field current to flow independently.
DC Shunt Motor Equations
Let’s consider the voltage (E) and current (Itotal ) supplied to the motor from the electrical terminal.
In a DC shunt motor, the supply current splits into two parts: Ia, flowing through the armature winding of resistance Ra and Ish, flowing through the field winding with resistance Rsh. The voltage across both windings stays the same.
From there we can write

Thus we put this value of armature current Ia to get general voltage equation of a DC shunt motor.
Now in general practice, when the motor is in its running condition, and the supply voltage is constant and the shunt field current given by,

But we know Ish ∝ Φ
i.e. field flux Φ is proportional to filed current Ish
Thus the field flux remains more or less constant, and for this reason, a shunt wound DC motor is called a constant flux motor. You can learn more about DC motors by studying our collection of over 1000 electrical questions.
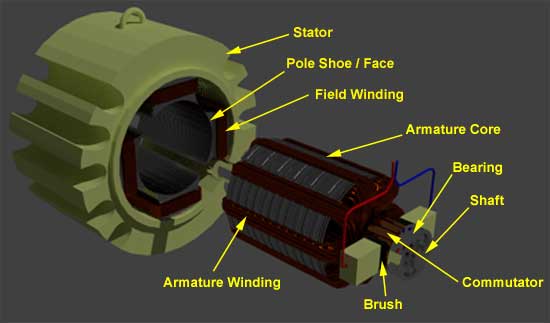
Construction of a Shunt Wound DC Motor
The construction of a dc shunt motor is pretty similar to other types of DC motor, as shown in the figure below.
One key design feature of the DC shunt motor is its ability to generate high torque. To achieve this, the armature winding must carry a higher current than the field winding, and the field winding must have many turns to increase flux linkage.
- The armature winding must be exposed to an amount of current that’s much higher than the field windings current, as the torque is proportional to the armature current.
- The field winding must be wound with many turns to increase the flux linkage, as flux linkage between the field and armature winding is also proportional to the torque.
Keeping these two above mentioned criterion in mind a DC shunt motor has been designed in a way, that the field winding possess much higher number of turns to increase net flux linkage and are lesser in diameter of conductor to increase resistance (reduce current flow) compared to the armature winding of the DC motor. And this is how a shunt wound DC motor is visibly distinguishable in static condition from the DC series motor (having thicker field coils) of the self excited type motor’s category.
Self-Speed Regulation of a Shunt Wound DC Motor
A very important and interesting fact about the DC shunt motor, is in its ability to self-regulate its speed on the application of the load to the shaft of the rotor terminals. This essentially means that on switching the motor running condition from no load to loaded, surprisingly there is no considerable change in speed of running, as would be expected in the absence of any speed regulating modifications from outside. Let us see how?
Let us do a step-wise analysis to understand it better.
- Initially considering the motor to be running under no load or lightly loaded condition at a speed of N rpm.
- On adding a load to the shaft, the motor does slow down initially, but this is where the concept of self regulation comes into the picture.
- At the very onset of load introduction to a shunt wound DC motor, the speed definitely reduces, and along with speed also reduces the back emf, Eb. Since Eb ∝ N, given by,
This can be graphically explained below.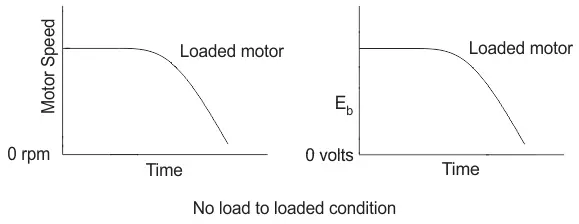
- This reduction in the counter emf or the back emf Eb results in the increase of the net voltage. As net voltage Enet = E − Eb. Since supply voltage E remains constant.
- As a result of this increased amount of net voltage, the armature current increases and consequently the torque increases.
Since, Ia ∝ Τ given by
The change in armature current and torque on supplying load is graphically shown below.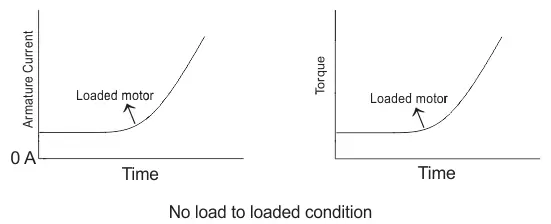
- This increase in the amount of torque increases the speed and thus compensating for the speed loss on loading. Thus the final speed characteristic of a DC shunt motor, looks like.
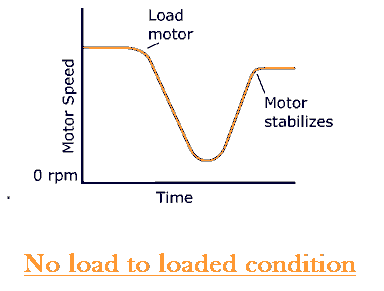
From there we can well understand this special ability of the shunt wound DC motor to regulate its speed by itself on loading and thus its rightly called the constant flux or constant speed motor. Because of which it finds wide spread industrial application where ever constant speed operation is required.