

- Equivalent Circuit Definition: The equivalent circuit of an induction motor shows its internal parameters like losses using inductors and resistors.
- Components of Equivalent Circuit: Includes elements like winding resistance (R1, R2), inductance (X1, X2), core loss (Rc), and magnetizing reactance (XM).
- Exact Equivalent Circuit: Provides detailed parameters, showing power and losses in the motor.
- Approximate Equivalent Circuit: Simplifies analysis by shifting the shunt branch but is less accurate for smaller motors.
- Single-Phase Induction Motor: Uses the double revolving field theory to explain its equivalent circuit, accounting for forward and backward rotating fields.
An induction motor is defined as a device that works on the principle of a transformer, often called a rotating transformer. When EMF is supplied to its stator, it induces voltage in its rotor through electromagnetic induction. In this way, an induction motor functions like a transformer with a rotating secondary, where the primary resembles the stator winding, and the secondary resembles the rotor.
The induction motor always runs below the synchronous or full load speed and the relative difference between the synchronous speed and speed of rotation is known as slip which is denoted by s.
Where, Ns is synchronous speed of rotation which is given by-
Where, f is the frequency of the supply voltage.
P is the number of poles of the machine.
Equivalent Circuit of an Induction Motor
The equivalent circuit of any machine is defined as a model that shows various parameters like Ohmic losses and other operational losses.
Losses are modeled using inductor and resistor. Copper losses occur in the windings, so winding resistance is included. The windings also have inductance, causing a voltage drop due to inductive reactance, affecting the power factor. For three-phase induction motors, there are two types of equivalent circuits.
Exact Equivalent Circuit
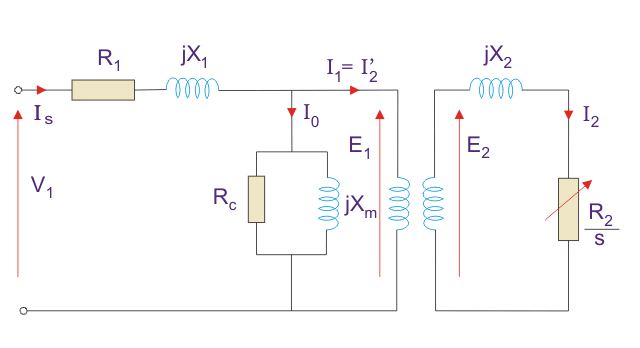
Here, R1 is the winding resistance of the stator.
X1 is the inductance of the stator winding.
Rc is the core loss component.
XM is the magnetizing reactance of the winding.
R2/s is the power of the rotor, which includes output mechanical power and copper loss of rotor.
If we draw the circuit with referred to the stator then the circuit will look like-
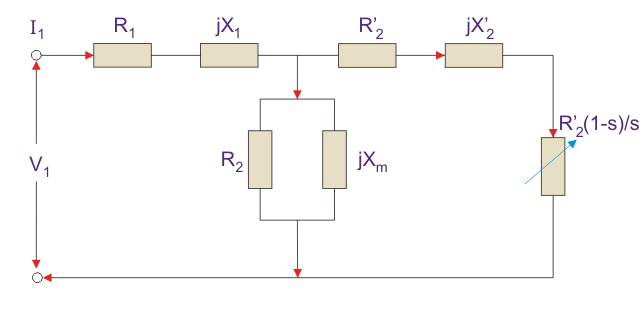
Here all the other parameters are same except-
R2’ is the rotor winding resistance with referred to stator winding.
X2’ is the rotor winding inductance with referred to stator winding.
R2(1 – s) / s is the resistance which shows the power which is converted to mechanical power output or useful power. The power dissipated in that resistor is the useful power output or shaft power.
Approximate Equivalent Circuit
The approximate equivalent circuit simplifies calculations by deleting one node and shifting the shunt branch towards the primary side. This is because the voltage drop between the stator resistance and inductance is minimal, making the supply voltage and induced voltage nearly equal. However, this model is not always accurate due to several reasons.
- The magnetic circuit of induction motor has an air gap so exciting current is larger compared to transformer so exact equivalent circuit should be used.
- The rotor and stator inductance is larger in induction motor.
- In induction motor, we use distributed windings.
This model can be used if approximate analysis has to be done for large motors. For smaller motors, we cannot use this.
Power Relation of Equivalent Circuit
- Input power to stator- 3 V1I1Cos(Ɵ).
Where, V1 is the stator voltage applied.
I1 is the current drawn by the stator winding.
Cos(Ɵ) is the stator power stator. - Rotor input =
Power input- Stator copper and iron losses. - Rotor Copper loss = Slip × power input to the rotor.
- Developed Power = (1 – s) × Rotor input power.
Equivalent Circuit of a Single Phase Induction Motor
The single-phase and three-phase equivalent circuits differ. The single phase induction motor circuit is explained by the double revolving field theory, which states that a stationary pulsating magnetic field can be resolved into two rotating fields of equal magnitude but opposite direction.
A stationary pulsating magnetic field might be resolved into two rotating fields, both having equal magnitude but opposite in direction. So the net torque induced is zero at standstill. Here, the forward rotation is called the rotation with slip s and the backward rotation is given with a slip of (2 – s). The equivalent circuit is-
In most of the cases the core loss component r0 is neglected as this value is quite large and does not affect much in the calculation.
Here, Zf shows the forward impedance and Zb shows the backward impedance.
Also, the sum of forward and backward slip is 2 so in case of backward slip, it is replaced by (2 – s).
R1 = Resistance of stator winding.
X1 = Inductive reactance of the stator winding.
Xm = Magnetising reactance.
R2’ = Rotor Reactance with referred to stator.
X2’ = Rotor inductive reactance with referred to stator.
Calculation of Power of Equivalent Circuit
- Find Zf and Zb.
- Find stator current which is given by Stator voltage/Total circuit impedance.
- Then find the input power which is given by
Stator voltage × Stator current × Cos(Ɵ)
Where, Ɵ is the angle between the stator current and voltage. - Power Developed (Pg) is the difference between forward field power and backward power. The forward and backward power is given by the power dissipated in the respective resistors.
- The rotor copper loss is given by- slip × Pg.
- Output Power is given by-
Pg – s × Pg – Rotational loss.
The rotational losses include friction loss, windage loss, Core loss. - Efficiency can also be calculated by diving output power by input power.