

- Dynamics of Electrical Drives Definition: The dynamics of electrical drives explain how motors and loads interact, especially when their speeds differ.
- Key Components: Important components include the polar moment of inertia (J), angular velocity (Wm), motor torque (T), and load torque (T1).
- Fundamental Torque Equation: This equation shows that motor torque balances load torque and dynamic torque, which is crucial during changes in motion.
- Dynamic Torque: Dynamic torque, J(dωm/dt), appears only during transient operations like starting or stopping, indicating acceleration or deceleration.
- Impact on Motion: By analyzing dynamic torque, we can determine if the motor is accelerating or decelerating, which is essential for efficient drive operation.
When an electric motor rotates, it is typically connected to a load with either rotational or translational motion. The motor’s speed can differ from the load’s speed. To understand this relationship, we use the concept of the dynamics of electrical drives.
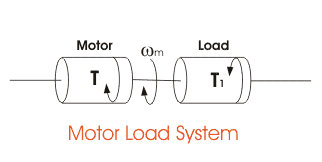
We can easily describe the dynamics of an electrical drive with the following example.
Here,
J = Polar moment of inertia of motor load
Wm = Instantaneous angular velocity
T = Instantaneous value of developed motor torque
T1 = Instantaneous value of load torque referred to motor shaft
Now, from the fundamental torque equation –
For drives with constant inertia,
This equation shows that motor torque balances both load torque and dynamic torque, represented as J(dωm/dt). Dynamic torque appears only during transient operations, like starting or stopping.
This equation helps us determine if the drive is accelerating or decelerating. During acceleration, the motor supplies both load torque and additional dynamic torque. Understanding this balance is crucial for effective electrical braking.