

- Bode Plot Definition: A Bode plot is a graphical representation that shows how the gain (magnitude) and phase of a system respond over a range of frequencies.
- Gain Margin and Phase Margin: Essential for assessing the stability of control systems, the gain margin and phase margin indicate how much gain or phase can change before the system becomes unstable.
- Calculation Techniques: The gain margin is calculated at the phase crossover frequency, while the phase margin is determined at the gain crossover frequency.
- Stability Analysis: Higher values of gain margin and phase margin typically suggest a more stable system.
- Practical Application: Bode plots are not only theoretical tools but are practical for designing and analyzing the stability of electronic and control systems in real-world applications.
What is a Bode Plot?
A Bode plot is a graph commonly used in control system engineering to determine the stability of a control system. A Bode plot maps the frequency response of the system through two graphs – the Bode magnitude plot (expressing the magnitude in decibels) and the Bode phase plot (expressing the phase shift in degrees).
Bode plots were first introduced in the 1930s by Hendrik Wade Bode while he was working at Bell Labs in the United States. Although Bode plots offer a relatively simple method to calculate system stability, they can not handle transfer functions with right half plane singularities (unlike the Nyquist stability criterion).
Understanding gain margins and phase margins are crucial to understanding Bode plots. These terms are defined below.
Gain Margin
Gain Margin Impact: A larger gain margin (GM) enhances system stability. Gain margin is the maximum gain increase or decrease (measured in dB) that doesn’t compromise stability.
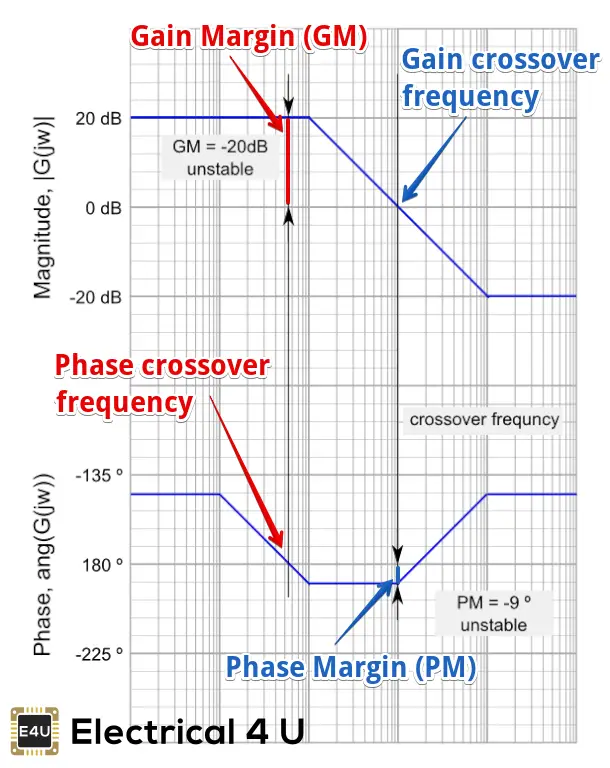
We can usually read the gain margin directly from the Bode plot (as shown in the diagram above). This is done by calculating the vertical distance between the magnitude curve (on the Bode magnitude plot) and the x-axis at the frequency where the Bode phase plot = 180°. This point is known as the phase crossover frequency.
Gain vs. Gain Margin: It’s crucial to understand that gain and gain margin are different. Specifically, the gain margin is the negative value of gain measured in decibels (dB).
Gain Margin Formula
The formula for Gain Margin (GM) can be expressed as:

Where G is the gain. This is the magnitude (in dB) as read from the vertical axis of the magnitude plot at the phase crossover frequency.
In our example shown in the graph above, the Gain (G) is 20. Hence using our formula for gain margin, the gain margin is equal to 0 – 20 dB = -20 dB (unstable).
Phase Margin
The greater the Phase Margin (PM), the greater will be the stability of the system. The phase margin refers to the amount of phase, which can be increased or decreased without making the system unstable. It is usually expressed as a phase in degrees.
Reading Phase Margin: You can determine the phase margin from the Bode plot by measuring the vertical distance from the phase curve to the x-axis at the gain crossover frequency, where the magnitude plot intersects 0 dB.
It is important to realize that the phase lag and the Phase Margin are not the same things. This will make sense when we look at the phase margin formula.
Phase Margin Formula
The formula for Phase Margin (PM) can be expressed as:

Where  is the phase lag (a number less than 0). This is the phase as read from the vertical axis of the phase plot at the gain crossover frequency.
is the phase lag (a number less than 0). This is the phase as read from the vertical axis of the phase plot at the gain crossover frequency.
In our example shown in the graph above, the phase lag is -189°. Hence using our formula for phase margin, the phase margin is equal to -189° – (-180°) = -9° (unstable).
As another example, if an amplifier’s open-loop gain crosses 0 dB at a frequency where the phase lag is -120°, then the phase lag -120°. Hence the phase margin of this feedback system is -120° – (-180°) = 60° (stable).
Bode Plot Stability
Below is a list of criterion relevant to drawing Bode plots (and calculating their stability):
- Gain Margin: Greater will the gain margin greater will be the stability of the system. It refers to the amount of gain, which can be increased or decreased without making the system unstable. It is usually expressed in dB.
- Phase Margin: Greater will the phase margin greater will be the stability of the system. It refers to the phase which can be increased or decreased without making the system unstable. It is usually expressed as phase.
- Gain Crossover Frequency: It refers to the frequency at which the magnitude curve cuts the zero dB axis in the bode plot.
- Phase Crossover Frequency: It refers to the frequency at which the phase curve cuts the negative times the 180o axis in this plot.
- Corner Frequency: The frequency at which the two asymptotes cuts or meet each other is known as break frequency or corner frequency.
- Resonant Frequency: The value of frequency at which the modulus of G (jω) has a peak value is known as the resonant frequency.
- Factors: Every loop transfer function {i.e. G(s) × H(s)} product of various factors like constant term K, Integral factors (jω), first-order factors ( 1 + jωT)(± n) where n is an integer, second-order or quadratic factors.
- Slope: There is a slope corresponding to each factor and the slope for each factor is expressed in the dB per decade.
- Angle: There is an angle corresponding to each factor and the angle for each factor is expressed in the degrees.
Now there are some results that one should remember in order to plot the Bode curve. These results are written below:
- Constant term K: This factor has a slope of zero dB per decade. There is no corner frequency corresponding to this constant term. The phase angle associated with this constant term is also zero.
- Integral factor 1/(jω)n: This factor has a slope of -20 × n (where n is an integer)dB per decade. There is no corner frequency corresponding to this integral factor. The phase angle associated with this integral factor is -90 × n. Here n is also an integer.
- First-order factor 1/ (1+jωT): This factor has a slope of -20 dB per decade. The corner frequency corresponding to this factor is 1/T radian per second. The phase angle associated with this first factor is -tan– 1(ωT).
- First order factor (1+jωT): This factor has a slope of 20 dB per decade. The corner frequency corresponding to this factor is 1/T radian per second. The phase angle associated with this first factor is tan– 1(ωT).
- Second order or quadratic factor : [{1/(1+(2ζ/ω)} × (jω) + {(1/ω2)} × (jω)2)]: This factor has a slope of -40 dB per decade. The corner frequency corresponding to this factor is ωn radian per second. The phase angle associated with this first factor is

How to Draw Bode Plot
Keeping all the above points in mind, we are able to draw a Bode plot for any kind of control system. Now let us discuss the procedure of drawing a Bode plot:
- Substitute the s = jω in the open loop transfer function G(s) × H(s).
- Find the corresponding corner frequencies and tabulate them.
- Now we are required for one semi-log graph to choose a frequency range such that the plot should start with the frequency which is lower than the lowest corner frequency. Mark angular frequencies on the x-axis, mark slopes on the left-hand side of the y-axis by marking a zero slope in the middle, and on the right-hand side mark phase angle by taking -180o in the middle.
- Calculate the gain factor and the type of order of the system.
- Now calculate the slope corresponding to each factor.
For drawing the Bode magnitude plot:
- Mark the corner frequency on the semi-log graph paper.
- Tabulate these factors moving from top to bottom in the given sequence.
- Constant term K.
- Integral factor

- First order factor

- First order factor (1+jωT).
- Second order or quadratic factor:

- Now sketch the line with the help of the corresponding slope of the given factor. Change the slope at every corner frequency by adding the slope of the next factor. You will get the magnitude plot.
- Calculate the gain margin.
For drawing the Bode phase plot:
- Calculate the phase function adding all the phases of factors.
- Substitute various values to the above function in order to find out the phase at different points and plot a curve. You will get a phase curve.
- Calculate the phase margin.
Bode Stability Criterion
The Bode Stability Criterion is defined as a method used in control system engineering to determine the stability of a system. This criterion revolves around the analysis of the frequency response of a system, specifically focusing on the phase margin and gain margin of the system’s open-loop response.
The Bode Stability Criterion are listed below:
- For a Stable System: Both the margins should be positive, or the phase margin should be greater than the gain margin.
- For Marginal Stable System: The margins should be zero or the phase margin should be equal to the gain margin.
- For Unstable System: If any of them is negative or the phase margin should be less than the gain margin.
Advantages of a Bode Plot
The advantages of the Bode plot include the following:
- It is based on the asymptotic approximation, which provides a simple method to plot the logarithmic magnitude curve.
- The multiplication of various magnitude that appears in the transfer function can be treated as an addition. In contrast, division can be treated as a subtraction using a logarithmic scale.
- With the help of this plot only we can directly comment on the stability of the system without doing any calculations.
- Bode plots provide relative stability in terms of gain margin and phase margin.
- They cover a wide frequency range (low to high-frequency).